——聚焦智能感知·诊断·协同,赋能高端装备数字化转型
研究所定位
依托学院学科优势,面向轨道交通、智能制造等国家战略领域,以智能测控为核心,致力于多源信息感知、动态诊断预测及多智能体协同控制的前沿技术研发与应用,推动高端装备从“被动运维”向“主动智能”升级,助力行业数字化、智能化转型。
关键研究方向
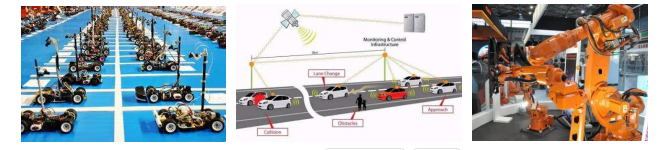
方向一:多智能体路径规划与协同控制技术
根据无人机、智能小车、移动式吊车和机械臂等智能体的结构特征及动力学特点,研究其三维空间轨迹规划方法;研究复杂环境下多任务模式多智能体间的通信、任务分配与多目标决策方法,实现多智能体的分工优化;研究多物理约束下多智能体的协同控制方法,实现多任务模式下智能车-车、智能机-机、智能车-机间的协同控制。
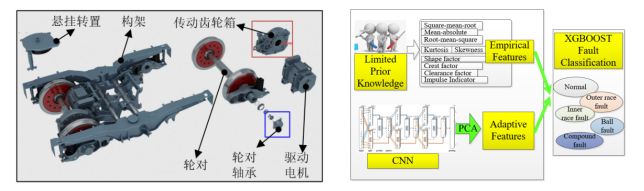
方向二:轨道车辆载荷智能化均衡分配技术及成套装备
采用先进的非接触式磁致伸缩位移传感器和高精度数字式载荷传感器、精密位移液压伺服控制系统及分布式计算机总线控制结构,应用参数识别、系统建模、载荷分析优化和人工智能技术,研制开发了高度自动化、智能化、试验过程快速、安全可靠、试验结果精确、可验证的先进大型试验系统,是目前国内外轨道机车车辆制造领域同类装置中自动化、智能化和可靠性水平最高、应用最成功的专用大型试验设备,其整体技术达到国内外领先水平。

方向三:轨道交通多源异构信息融合与列车运行协同控制技术研究
针对未来智慧铁路、智能列车,研究轨道交通多源异构信息的感知、转换和融合方法,形成列车运行协同控制的智慧信息架构及互联互通信息源。依托国内轨道交通信号研究院、企业,基于目前的CTCS2及CTCS3系统,研究非确定场景、复杂工况下列车平稳运行的自学习协同控制方法,形成未来智慧列车的列车级、车辆级、驱动级智能化控制构架及控制策略,实现列车运行控制系统由“面向场景控制”向“面向非确定场景自主控制”的转变。
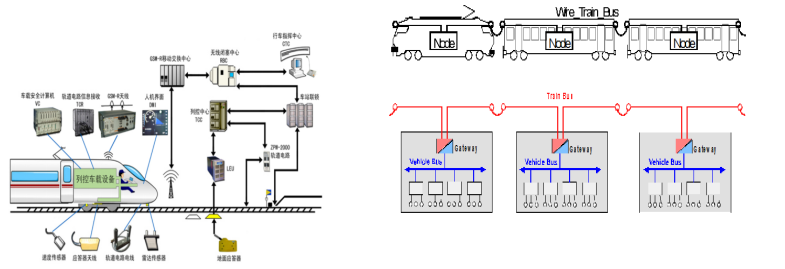
方向四:磁浮列车自主协同运行控制理论及关键技术
基于国产核心芯片的新型2x2取2安全体系构架原理及技术,研究列车多源信息感知及融合技术、多源异构数据安全通信技术,形成磁浮列车多网融合环境下故障预警及安全导向关键技术,构建磁浮列车中枢系统—神经网络—神经末梢间数据安全通讯链路;研究磁浮列车基于无线指挥调度级、列车级、车辆级、驱动控制级四级体系,形成磁浮列车内部设备协同联动、列车与地面协同互动、列车追踪协同运动、列车与运行环境协同智动的控制理论与关键技术,实现协同决策、协同控制、协同运行。